ステッピングモータ って? Stepper motor Pulse motor [ものづくり]
ステッピングモータについてお話していません?でしたので補足です。
(ご存知の方は読み飛ばして下さい。
○リエンタルモーター様が詳しいですね。リンクフリーではありませんのでしたので伏せ字ですみません)
基本原理は、
のように順番に電磁石の起動している位置を動かすことで中心の磁石=軸を回転させます。
以前のブラシモーターとの違いはというと、
ブラシ(整流子)が無いということと、磁石が軸についているということでしょうか?
ですが、ステッピングモーターも外部(内部につけることも可能ですが)にブラシをつけるとにた感じすることは出来ますし、
ホール素子とか磁力でスイッチするとブラシレスモーターとなるのでしょう?
上の図では4個の電磁石で1回転しますから1ステップ90°ということでしょうか?
市販のステッピングモーターは1ステップ1.8°が普通ですから、360/1.8=200で、
200個の電磁石が入っている・・・わけはありませんね。
作るの大変そうですし。
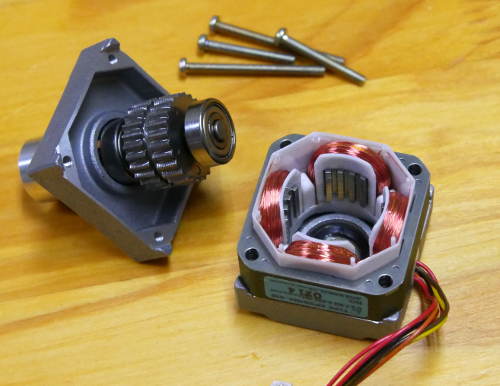
実際のステッピングモーターを分解すると、

写真のモーターは1ステップ3.6°のものですが電磁石は4個です。
肝心なところは、軸の前後にずれた鉄の歯車と、電磁石の所の出っ張りです。
歯車の間に磁石が入っていて前の歯車がN極とすると、後の歯車がS極になるように作られているのですね。
そして歯の幅分ずれていることで、歯の数の磁石があるのと同じ作用を示すのです。
うまいこと考えたものです。
電磁石とどうやって引き合う(退け合う)か?ですが、
1ステップ3.6°とするためには、
隣り合う電磁石が、3.6°ずれている(この場合90+3.6°)位置に出っ張りを持っていけばいいのです。
そして出っ張りの幅は、歯車1つ分(小さいと効率悪そうです)より大きく、
2つ分より小さいくないといけません?
角度さえちゃんとしていれば構造は意外と簡単なのでした。
そして、結構パワフルです。
写真のモーターは、4×4cm×3cmですが1.5kg/cmものトルクがある?のです。
(12V160mA、静止トルク750g/cm)
ちなみにラジコンでよくある、
RS-380PHは適正負荷100g/cm、
停動トルク=950g/cm、でなんと14Aらしいです???
回転数はステッピングモータは・・・ですが。
なので380K10~380K300 のようにギヤダウンすると・・・
さて、モーターが単純な分、動かすために何かしらの工夫が必要です。
前日のようにモーターどうしを結線すると動かせますが・・・
手動でする場合、スイッチを順番に入れたり切ったりすればできます、
(ロータリースイッチを分解して作ると面白いですよ)
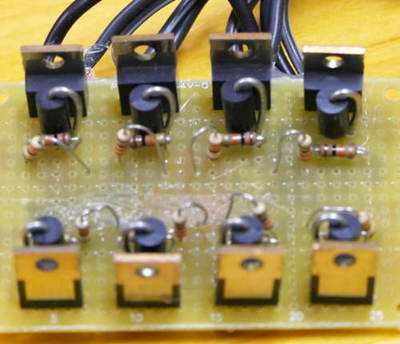
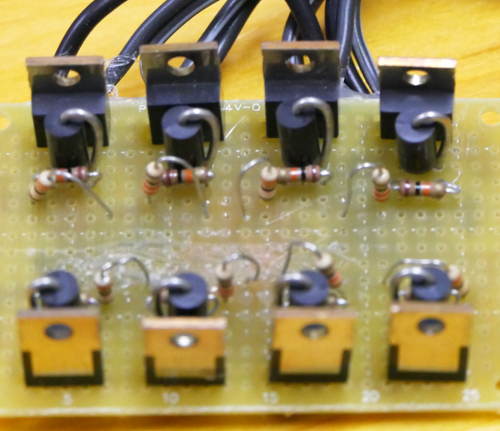
ですが普通は?こんな風にトランジスター4っつを並べて電気的に切り替えます。
一般的に使う場合には、ドライバICを使うのでしょう。
(PICとかのときにはノイズ対策でトランジスタを並べる方が好みです、
電気もあまり気になりませんしね)
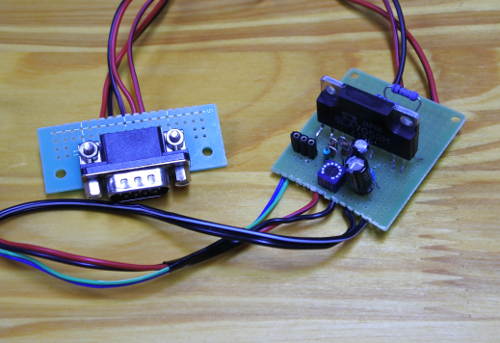
ちょうどジャンク箱にSLA7052Mという石がありましたので、
試作しました。
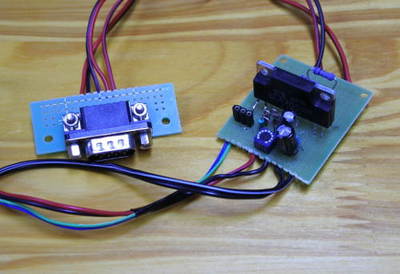
な感じです。
残念ながら10V以上必要なので、望遠鏡のドライバとして使用すると電池が大変そうです。
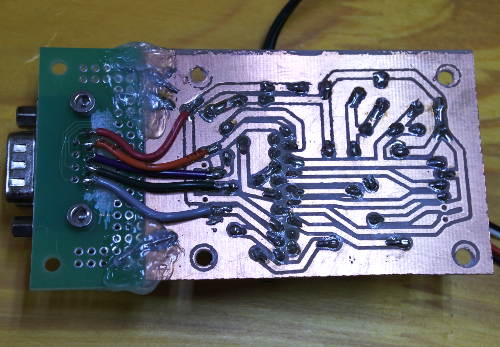
ついでに、感光基板もありましたので、

部品面と、
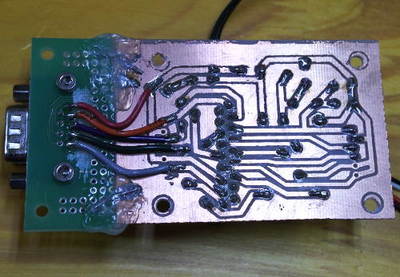
銅箔面です。
ちょっと古い感光基板でしたのでパターンが粗いのはご勘弁、笑
何かの参考になるかもしれませんのでマスクパターンをアップしておきます。
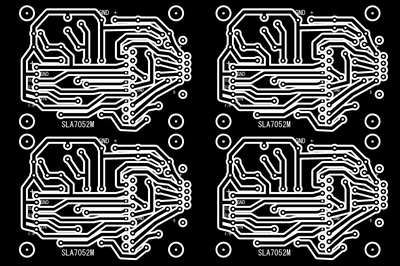
150×100mm用です。
部品面ですから、裏返すのをお忘れなく。
上の写真とは異なり、Dsubで基板から引き出せるようにしました。
Full/HalfとSyncは使用しないことが多いのでGNDにおとしてあります。
このためノイズに弱いかもしれません。
(この手のトリガークロック動作物は1点アースを守らないと頻繁にエラーが出ますので・・・)
必要でしたらパターンカットで対応願います。
下は部品図で定数はマニュアル等でご確認下さい。
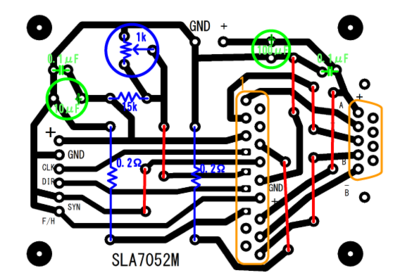
あっ、いつものようにマスクは自由にお使い下さい。
ちょっと古い石ですから入手が大変そうですが・・・(メーカーでは保守品?みたいですね)
追加)5相モーターはこちら
(ご存知の方は読み飛ばして下さい。
○リエンタルモーター様が詳しいですね。リンクフリーではありませんのでしたので伏せ字ですみません)
基本原理は、

のように順番に電磁石の起動している位置を動かすことで中心の磁石=軸を回転させます。
以前のブラシモーターとの違いはというと、
ブラシ(整流子)が無いということと、磁石が軸についているということでしょうか?
ですが、ステッピングモーターも外部(内部につけることも可能ですが)にブラシをつけるとにた感じすることは出来ますし、
ホール素子とか磁力でスイッチするとブラシレスモーターとなるのでしょう?
上の図では4個の電磁石で1回転しますから1ステップ90°ということでしょうか?
市販のステッピングモーターは1ステップ1.8°が普通ですから、360/1.8=200で、
200個の電磁石が入っている・・・わけはありませんね。
作るの大変そうですし。
実際のステッピングモーターを分解すると、
写真のモーターは1ステップ3.6°のものですが電磁石は4個です。
肝心なところは、軸の前後にずれた鉄の歯車と、電磁石の所の出っ張りです。
歯車の間に磁石が入っていて前の歯車がN極とすると、後の歯車がS極になるように作られているのですね。
そして歯の幅分ずれていることで、歯の数の磁石があるのと同じ作用を示すのです。
うまいこと考えたものです。
電磁石とどうやって引き合う(退け合う)か?ですが、
1ステップ3.6°とするためには、
隣り合う電磁石が、3.6°ずれている(この場合90+3.6°)位置に出っ張りを持っていけばいいのです。
そして出っ張りの幅は、歯車1つ分(小さいと効率悪そうです)より大きく、
2つ分より小さいくないといけません?
角度さえちゃんとしていれば構造は意外と簡単なのでした。
そして、結構パワフルです。
写真のモーターは、4×4cm×3cmですが1.5kg/cmものトルクがある?のです。
(12V160mA、静止トルク750g/cm)
ちなみにラジコンでよくある、
RS-380PHは適正負荷100g/cm、
停動トルク=950g/cm、でなんと14Aらしいです???
回転数はステッピングモータは・・・ですが。
なので380K10~380K300 のようにギヤダウンすると・・・
さて、モーターが単純な分、動かすために何かしらの工夫が必要です。
前日のようにモーターどうしを結線すると動かせますが・・・
手動でする場合、スイッチを順番に入れたり切ったりすればできます、
(ロータリースイッチを分解して作ると面白いですよ)
ですが普通は?こんな風にトランジスター4っつを並べて電気的に切り替えます。
一般的に使う場合には、ドライバICを使うのでしょう。
(PICとかのときにはノイズ対策でトランジスタを並べる方が好みです、
電気もあまり気になりませんしね)
ちょうどジャンク箱にSLA7052Mという石がありましたので、
試作しました。
な感じです。
残念ながら10V以上必要なので、望遠鏡のドライバとして使用すると電池が大変そうです。
ついでに、感光基板もありましたので、

部品面と、
銅箔面です。
ちょっと古い感光基板でしたのでパターンが粗いのはご勘弁、笑
何かの参考になるかもしれませんのでマスクパターンをアップしておきます。

150×100mm用です。
部品面ですから、裏返すのをお忘れなく。
上の写真とは異なり、Dsubで基板から引き出せるようにしました。
Full/HalfとSyncは使用しないことが多いのでGNDにおとしてあります。
このためノイズに弱いかもしれません。
(この手のトリガークロック動作物は1点アースを守らないと頻繁にエラーが出ますので・・・)
必要でしたらパターンカットで対応願います。
下は部品図で定数はマニュアル等でご確認下さい。

あっ、いつものようにマスクは自由にお使い下さい。
ちょっと古い石ですから入手が大変そうですが・・・(メーカーでは保守品?みたいですね)
追加)5相モーターはこちら




すごく判り易くてつい見てしまいます。
by tanukyan (2018-11-15 15:59)
tanukyanさま、おはようございます。
そう言って頂くとうれしいです。
今後ともよろしくお願いいたします。
by dumbo (2018-11-16 07:33)