紫外線をあててみましょう 蛍石② [顕微鏡・機材など]
フローライトの蛍光色の確認のため、紫外線を発光するライトを色々試してみました。
発光のベスト?写真をはじめに掲載です。

発光前の色は

カラーバランスのせい? 若干、みどりが薄いかな?
もう一つ

発光前で

白色光とのミックス

がいい感じでしょうか?
試用したライト達です。名前をふっておきました。

ウッドライトは366nmの紫外線を出すライトで、特殊なフィルターが装着されていますね。
刑事もののドラマとかで、ルミノール反応の確認でお目にしたことがあるかと。
ブラックライトは紫外線を発する蛍光灯の一種ですね。
LEDは370nm?にピークがあるものを使用しています。
紫外線フィルターと書いてあるものは数十年前に自作した紫外線発生装置?です。
コダック社で販売していた360nm付近以外の光を除去する特殊なフィルターを使用しています。
なんでも1枚も売れたことがなかったらしく、注文するときに驚かれた思い出があるものです。
それぞれの発光具合を下に示しましょう。

LEDです。やはり紫外線以外も発光するので、机のほうが目立ちます。

ウッドライトです。おしい感じで、若干、机も光ってしまって余分な光が出ているのでしょうか?
たぶん発光が強すぎて、まわりに光が広がっているのでしょうね。

ブラックライトで、少し光量が弱いのでしょうか暗くなってしまいました。
単純に露出の問題かとも思います、汗。

自作のものです。発光のコントラストがいい感じでしょうか?
ということではじめの写真はこちらの光源を使用しています。
LEDがいまいちな感じで、申し訳ないのでもっと強力なものを試しますと、

すごく濃い青、群青という感じ?の発色を示しました。
このLEDが面白いのは白い光も同時に出ているようで、机の生の色も出ていますね。
こんな感じのLEDで、10Wの出力だったかと思います。(メーカー名は不明です)
顕微鏡に装着できるようアダプタを接続してあるので、そのうち活躍するかもしれません。
なんか、目がショボショボするのは紫外線を見つめたせい?注意しないといけませんでしたね・・・
おまけ)お札に紫外線をあてますと、

ハンコが赤く

こちらはオレンジ色で、結構カラフルですね。
発光のベスト?写真をはじめに掲載です。

発光前の色は

カラーバランスのせい? 若干、みどりが薄いかな?
もう一つ

発光前で

白色光とのミックス

がいい感じでしょうか?
試用したライト達です。名前をふっておきました。

ウッドライトは366nmの紫外線を出すライトで、特殊なフィルターが装着されていますね。
刑事もののドラマとかで、ルミノール反応の確認でお目にしたことがあるかと。
ブラックライトは紫外線を発する蛍光灯の一種ですね。
LEDは370nm?にピークがあるものを使用しています。
紫外線フィルターと書いてあるものは数十年前に自作した紫外線発生装置?です。
コダック社で販売していた360nm付近以外の光を除去する特殊なフィルターを使用しています。
なんでも1枚も売れたことがなかったらしく、注文するときに驚かれた思い出があるものです。
それぞれの発光具合を下に示しましょう。

LEDです。やはり紫外線以外も発光するので、机のほうが目立ちます。

ウッドライトです。おしい感じで、若干、机も光ってしまって余分な光が出ているのでしょうか?
たぶん発光が強すぎて、まわりに光が広がっているのでしょうね。

ブラックライトで、少し光量が弱いのでしょうか暗くなってしまいました。
単純に露出の問題かとも思います、汗。

自作のものです。発光のコントラストがいい感じでしょうか?
ということではじめの写真はこちらの光源を使用しています。
LEDがいまいちな感じで、申し訳ないのでもっと強力なものを試しますと、

すごく濃い青、群青という感じ?の発色を示しました。
このLEDが面白いのは白い光も同時に出ているようで、机の生の色も出ていますね。
こんな感じのLEDで、10Wの出力だったかと思います。(メーカー名は不明です)
顕微鏡に装着できるようアダプタを接続してあるので、そのうち活躍するかもしれません。
なんか、目がショボショボするのは紫外線を見つめたせい?注意しないといけませんでしたね・・・
おまけ)お札に紫外線をあてますと、

ハンコが赤く

こちらはオレンジ色で、結構カラフルですね。
蛍石をマクロレンズでっ LeicaDG45mm Zuiko36mmF3.5 Zuiko20mmF3.5 PlanCN4 [顕微鏡・機材など]
プログラムが行き詰っているので、メモ代わりに今日はレンズのチェックでもっと。
被写体は

ダイアナマリナ鉱山産フローライト、蛍石です。紫外線をあてると発光する石で、1粒8㎜くらいです。

蛍石と呼ばれていても光らないものもあるのですが、
ダイアナマリナのものは紫外線で綺麗に青色に発光します。
この石を撮影したかったというのが本当のところでしょうか?
以前は顕微鏡レンズのみでしたが、久しぶりにマクロレンズもまじえて箪笥の奥から発掘されたZuikoさんたちです。

LeicaDG45mm、Zuiko36mmF3.5、Zuiko20mmF3.5、PlanCN4をチェックしてみました。
初めは標準ズームでどんな感じか確認画像を。
Leica DG VarioElmarit 12-16mm F2.8-4です。

もっと寄れる?かもしれませんが、18mmくらいでAFが効く大体最短です。
このレンズはなにより最短距離が短いのですごく使いやすいですよね。
小さい物好きなDamuboには最適?で画像もいい感じに撮れますし。

10mmのエクステンションを付けると上のような感じに。ピントが合わないのでズームしてます。

10mm+16mmのエクステンションを付けると上の感じ。ピントはズームで調節で。
レンズ前ギリギリで陰が・・・
Leica DG MacroElmarit 45mm F2.8です。

大体最短距離です。
撮影時の液晶ではもっと解像しているのですが、撮り方でしょうか?甘くなってしまいました。

10㎜のエクステンションで上の感じ。

10+16mmエクステンションで上です。
Zuiko Macro 38mm F3.5で、接写用?RMSマウントの特殊レンズです。

顕微鏡マウントですから自作のアダプターを使用しています。鏡筒長は大体85㎜です。

エクステンション付けて鏡筒長100㎜です。
Zuiko Macro 20mm F3.5です。

こちらは鏡筒長少し伸ばしたくらいでは変化ないのでこれだけです。
PlanCN ×4 無限光学系顕微鏡レンズです。

鏡筒長は大体85㎜。無限光学系なので結像レンズが必要そうですが、なしでもこんな感じに見えるのですね。
周辺の流れは結像レンズで改善するのでしょうか?

鏡筒長100㎜です。
色々撮影しましたが、ここまでくるとどれも変わらない感じもしますがいかがでしょう?
偽色の発生や周辺の歪など細かく見るときりないですし、どちらかというと、ピントやシッカリ固定してぶれないようにする方が難しいかと。(上の写真ほとんどブレてしまってますし・・・汗)
自作のアダプターは、

こんな感じでエクステンションなしで鏡筒長約85mm(写真は100mm)です。
ジャンクのFマウント70-210mmズームを分解したら中のネジがCマウントスレッドだったのでちょうどいいかなっと。
絞りも流用していい感じ。C→RMSアダプターが必要ですが。
さらにDamuboのカメラは、マイクロフォーサーズですからF→m4/3アダプターを使用します。
最近はフルサイズのミラーレスが流行ってますが、顕微鏡写真ではケラレの問題があって、
マイクロフォーサーズから離れられません。(間に撮影レンズを入れると画質の低下が著しい)
今のところそれが、m4/3を使っている理由でしょうか。
(上のアダプターにはレンズがありません。)
学問的なところを補足すると(たいしたことではありませんが)
カメラ用レンズと、顕微鏡レンズの焦点距離の比較ですが、一般にレンズの焦点距離:f、倍率:mとすると。
m=250/f ですから。
4倍のレンズでは、4=250/fで、f=250/4から、f=62.5mm。
4倍のレンズの焦点距離は62.5mmとなるのでしょう。
同様に、10倍で25mm。20倍で12.5mm、40倍で6.25mm、100倍で2.5mmです。
逆にZuiko Macro 20mm F3.5は、250/20=12.5倍、
Zuiko Macro 38mm F3.5は、6.6倍くらいになるということですね。
被写体は

ダイアナマリナ鉱山産フローライト、蛍石です。紫外線をあてると発光する石で、1粒8㎜くらいです。

蛍石と呼ばれていても光らないものもあるのですが、
ダイアナマリナのものは紫外線で綺麗に青色に発光します。
この石を撮影したかったというのが本当のところでしょうか?
以前は顕微鏡レンズのみでしたが、久しぶりにマクロレンズもまじえて箪笥の奥から発掘されたZuikoさんたちです。

LeicaDG45mm、Zuiko36mmF3.5、Zuiko20mmF3.5、PlanCN4をチェックしてみました。
初めは標準ズームでどんな感じか確認画像を。
Leica DG VarioElmarit 12-16mm F2.8-4です。

もっと寄れる?かもしれませんが、18mmくらいでAFが効く大体最短です。
このレンズはなにより最短距離が短いのですごく使いやすいですよね。
小さい物好きなDamuboには最適?で画像もいい感じに撮れますし。

10mmのエクステンションを付けると上のような感じに。ピントが合わないのでズームしてます。

10mm+16mmのエクステンションを付けると上の感じ。ピントはズームで調節で。
レンズ前ギリギリで陰が・・・
Leica DG MacroElmarit 45mm F2.8です。

大体最短距離です。
撮影時の液晶ではもっと解像しているのですが、撮り方でしょうか?甘くなってしまいました。

10㎜のエクステンションで上の感じ。

10+16mmエクステンションで上です。
Zuiko Macro 38mm F3.5で、接写用?RMSマウントの特殊レンズです。

顕微鏡マウントですから自作のアダプターを使用しています。鏡筒長は大体85㎜です。

エクステンション付けて鏡筒長100㎜です。
Zuiko Macro 20mm F3.5です。

こちらは鏡筒長少し伸ばしたくらいでは変化ないのでこれだけです。
PlanCN ×4 無限光学系顕微鏡レンズです。

鏡筒長は大体85㎜。無限光学系なので結像レンズが必要そうですが、なしでもこんな感じに見えるのですね。
周辺の流れは結像レンズで改善するのでしょうか?

鏡筒長100㎜です。
色々撮影しましたが、ここまでくるとどれも変わらない感じもしますがいかがでしょう?
偽色の発生や周辺の歪など細かく見るときりないですし、どちらかというと、ピントやシッカリ固定してぶれないようにする方が難しいかと。(上の写真ほとんどブレてしまってますし・・・汗)
自作のアダプターは、

こんな感じでエクステンションなしで鏡筒長約85mm(写真は100mm)です。
ジャンクのFマウント70-210mmズームを分解したら中のネジがCマウントスレッドだったのでちょうどいいかなっと。
絞りも流用していい感じ。C→RMSアダプターが必要ですが。
さらにDamuboのカメラは、マイクロフォーサーズですからF→m4/3アダプターを使用します。
最近はフルサイズのミラーレスが流行ってますが、顕微鏡写真ではケラレの問題があって、
マイクロフォーサーズから離れられません。(間に撮影レンズを入れると画質の低下が著しい)
今のところそれが、m4/3を使っている理由でしょうか。
(上のアダプターにはレンズがありません。)
学問的なところを補足すると(たいしたことではありませんが)
カメラ用レンズと、顕微鏡レンズの焦点距離の比較ですが、一般にレンズの焦点距離:f、倍率:mとすると。
m=250/f ですから。
4倍のレンズでは、4=250/fで、f=250/4から、f=62.5mm。
4倍のレンズの焦点距離は62.5mmとなるのでしょう。
同様に、10倍で25mm。20倍で12.5mm、40倍で6.25mm、100倍で2.5mmです。
逆にZuiko Macro 20mm F3.5は、250/20=12.5倍、
Zuiko Macro 38mm F3.5は、6.6倍くらいになるということですね。

野外で顕微鏡を使ってみました [顕微鏡・機材など]
どんな微生物がいるのかと、以前から気になっていたのですが、
公園の水は持ち帰れませんのでどうしようか?っと・・・
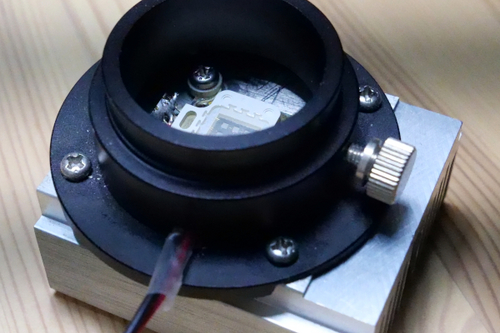
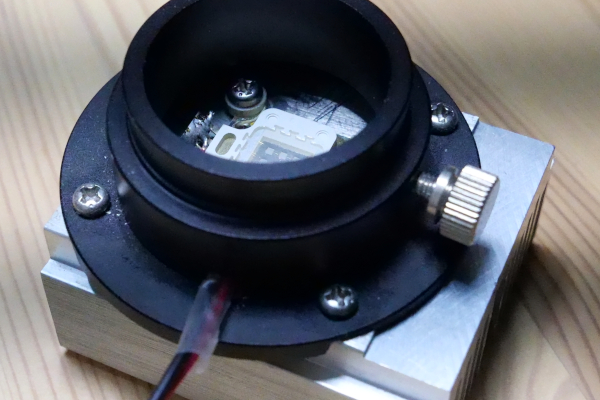
そこで、ジャンクの顕微鏡を改造して持ち込んでみました。
落ち着いて撮影できなかったので荒い画像ですが、

繊毛虫でしょうか、スポイト一滴ですが、確認できました。
何とか外でも使えそうな感じでしょうか???
コンパクトですがやはり重量が・・・でした。
顕微鏡の使い方 3Dで解説にテロップを入れてみました。 [顕微鏡・機材など]
以前作りました、3D顕微鏡?ですが、使い方の説明に解説を加えてみました。
取りたてて新しいものではありませんがご紹介です。
再生できない場合、ダウンロードは🎥こちら
標本のセットからのものです。
再生できない場合、ダウンロードは🎥こちら
コンデンサーの調節です。
開口数の解説はこちらです。
普通は、対物レンズに書いてある数値とコンデンサーの数値を一致させるのであまり動かしませんが、
明るさ調節で動かしたりすることが多々あるかと思います。
また、位置の調節では、光源の絞りを絞る必要があるので、ない場合は、五十円玉とかを光源の前に置いたりすると良いかもしれませんね。
顕微鏡像とずれていますがうーん難しいですね。今度調整しますね。
・・・今度はいつかなぁ・・・
学校関係者の方は、フォレスタネット様でどうぞ。(ログインが必要かも)
詳しくは、前の記事の解説をどうぞ。
取りたてて新しいものではありませんがご紹介です。
再生できない場合、ダウンロードは🎥こちら
標本のセットからのものです。
再生できない場合、ダウンロードは🎥こちら
コンデンサーの調節です。
開口数の解説はこちらです。
普通は、対物レンズに書いてある数値とコンデンサーの数値を一致させるのであまり動かしませんが、
明るさ調節で動かしたりすることが多々あるかと思います。
また、位置の調節では、光源の絞りを絞る必要があるので、ない場合は、五十円玉とかを光源の前に置いたりすると良いかもしれませんね。
顕微鏡像とずれていますがうーん難しいですね。今度調整しますね。
・・・今度はいつかなぁ・・・
学校関係者の方は、フォレスタネット様でどうぞ。(ログインが必要かも)
詳しくは、前の記事の解説をどうぞ。
顕微鏡? 作ってみました。3DですBlender [顕微鏡・機材など]
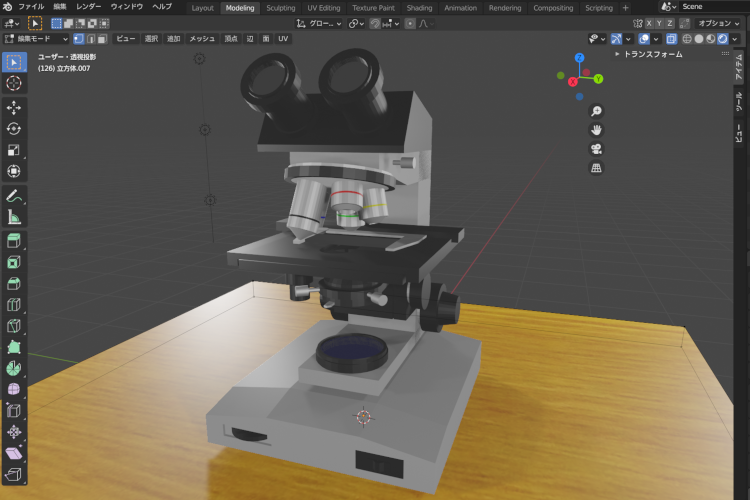
実物でと思ったのですが、ビデオで自由に動かしたいので3Dでとなりました。
フリー素材と思ったのですが、やはり自前で・・・ないと、っと
今回はdamuboのBlenderの練習ということで、休憩といったところです。
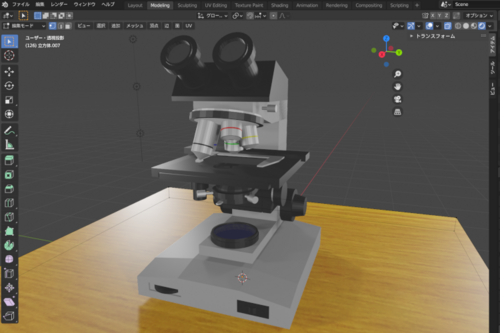
作業しているところでほぼ出来上がりです。
作りこみが甘いのはご愛敬、汗。
Blenderすごい!使いやすくて、これがフリーとはすごいことです。うーん。
ホントに凄いことですね。開発者の皆様ありがとうございます。
動画も作ってみました。
再生できない場合、ダウンロードは🎥こちら
では、また。
学校関係者の方は、フォレスタネット様でどうぞ。(ログインが必要かも)
詳しくは、前の記事の解説をどうぞ。
フリー素材と思ったのですが、やはり自前で・・・ないと、っと
今回はdamuboのBlenderの練習ということで、休憩といったところです。
作業しているところでほぼ出来上がりです。
作りこみが甘いのはご愛敬、汗。
Blenderすごい!使いやすくて、これがフリーとはすごいことです。うーん。
ホントに凄いことですね。開発者の皆様ありがとうございます。
動画も作ってみました。
再生できない場合、ダウンロードは🎥こちら
では、また。
学校関係者の方は、フォレスタネット様でどうぞ。(ログインが必要かも)
詳しくは、前の記事の解説をどうぞ。
極軸合せ? 改良では無いドリフト法? 再び Drift Method of Polar Alignment? [顕微鏡・機材など]
実際にためす前にシュミレートしてみました。
使用したのは、フリーソフトでは有名なFreeCADです。
こういう使い方をする人はいないでしょうが?、便利です。
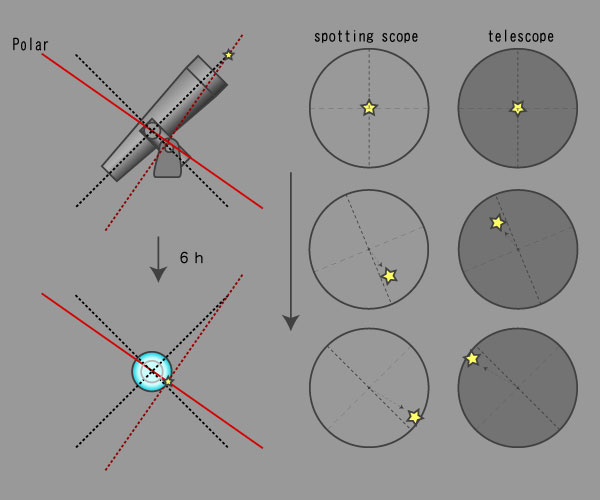
今度は方位から。
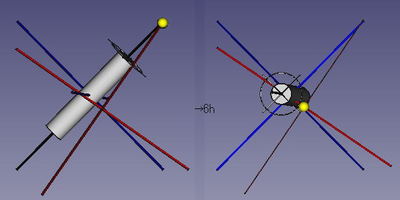
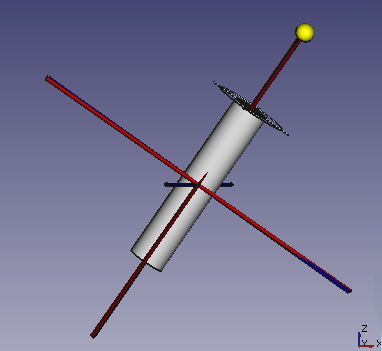
横から見るとこんな感じです。
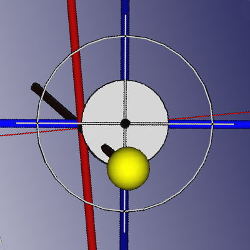
では、3時間後
そして、6時間後
やはり、望遠鏡の視野では、上下に移動していますね。
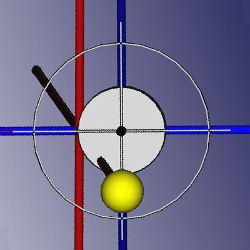
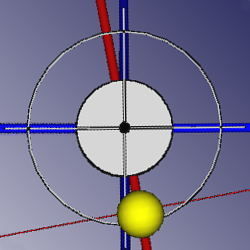
今度は高度がずれている場合です。
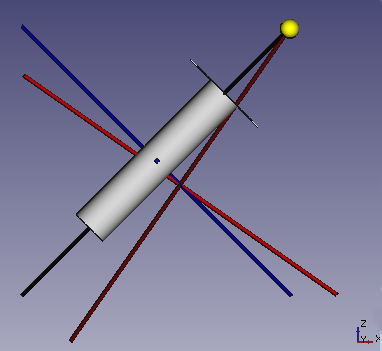
3時間後
そして、6時間後です。
このことから、星は上下に移動して、なおかつ、横にもずれるということです。
また、良く見ると方位より移動量が大きくなるようです。
前回は方位から調節と、ご紹介しましたが、
移動量が大きい高度から調整したほうが無難かもしれません。
いいかえると、中心線から横にずれている場合、高度を先に補正しないと、
方位で動かしすぎてしまう恐れがあると言えそうです。
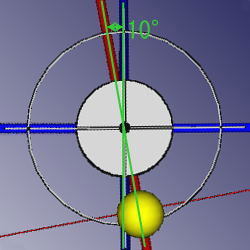
角度を計測すると、
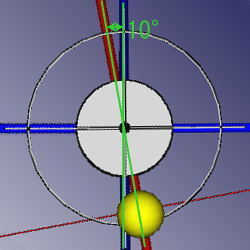
ちょうど高度をずらせた、10°に一致しています。
ちなみに、方位、高度両方がずれますと、
6時間後で
ずれが加算されるのですね。
さらに、10°よりずれが大きそうなところも、ご注目ということでしょうか?
3次元では(2次元でも)回転移動の時には順番が重要ですから、
こんなところにも幾何学?のマジックが・・・隠れているのかもしれません。
(初めに、視野の中心に星を合せますので回転+移動の順番が重要なのでしょう?
中心位置がずれますので、回転してから、移動するのと、
移動してから回転するのでは全く違う位置になってしまいます。コンガラガリマスヨネ?)
したがって初めに、高度調節を先にする場合にも、少しづつにしてということのようです。
なにかのご参考になりましたら、うれしいです。
使用したのは、フリーソフトでは有名なFreeCADです。
こういう使い方をする人はいないでしょうが?、便利です。
今度は方位から。
横から見るとこんな感じです。
では、3時間後
そして、6時間後
やはり、望遠鏡の視野では、上下に移動していますね。
今度は高度がずれている場合です。
3時間後
そして、6時間後です。
このことから、星は上下に移動して、なおかつ、横にもずれるということです。
また、良く見ると方位より移動量が大きくなるようです。
前回は方位から調節と、ご紹介しましたが、
移動量が大きい高度から調整したほうが無難かもしれません。
いいかえると、中心線から横にずれている場合、高度を先に補正しないと、
方位で動かしすぎてしまう恐れがあると言えそうです。
角度を計測すると、
ちょうど高度をずらせた、10°に一致しています。
ちなみに、方位、高度両方がずれますと、

6時間後で
ずれが加算されるのですね。
さらに、10°よりずれが大きそうなところも、ご注目ということでしょうか?
3次元では(2次元でも)回転移動の時には順番が重要ですから、
こんなところにも幾何学?のマジックが・・・隠れているのかもしれません。
(初めに、視野の中心に星を合せますので回転+移動の順番が重要なのでしょう?
中心位置がずれますので、回転してから、移動するのと、
移動してから回転するのでは全く違う位置になってしまいます。コンガラガリマスヨネ?)
したがって初めに、高度調節を先にする場合にも、少しづつにしてということのようです。
なにかのご参考になりましたら、うれしいです。
極軸合せ? 改良では無いドリフト法? Drift Method of Polar Alignment? [顕微鏡・機材など]
生き物から・・・遠ざかっていますが、
え~考えが浮かびましたので、dumboのメモです。
以前極軸合せで、改良ドリフト法をご紹介しましたが、もう少し簡単な方法をと模索?迷走?瞑想しましたので~
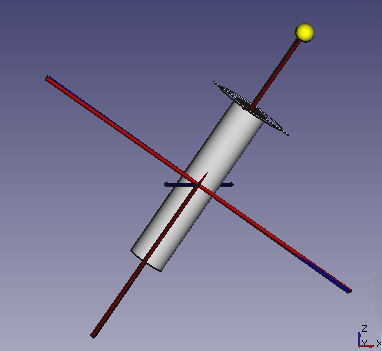
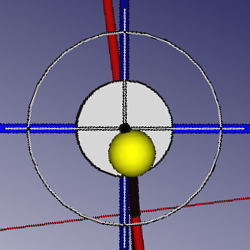
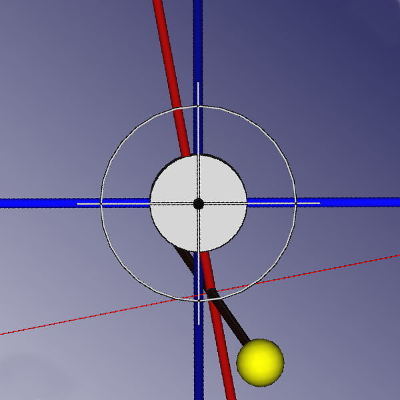
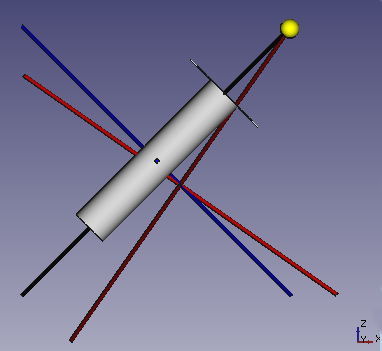
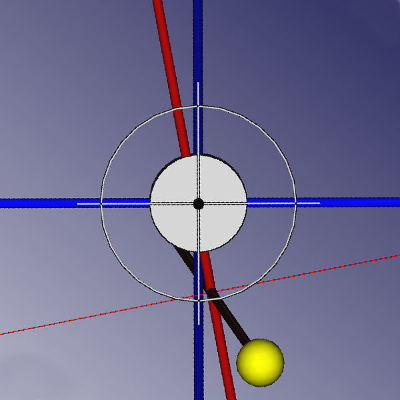
図示しますとこんな感じで、至極簡単です。
(ご存知の方はいまさらという事でお恥ずかしい)
要は、極軸と垂直の方に望遠鏡を向けてガイドモーターを動かすという事です。
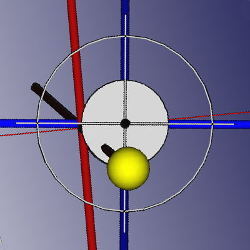
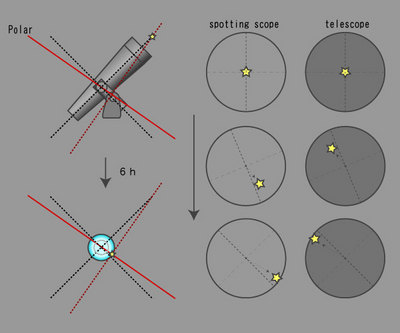
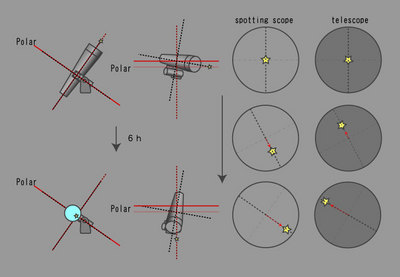
図のように望遠鏡の軸が、極軸より上になっている場合、
望遠鏡で見える星が下(望遠鏡は回転しますので、望遠鏡を中心と考えて)に移動していくという事です。
図ではわかりやすいように6時間後を表しています。
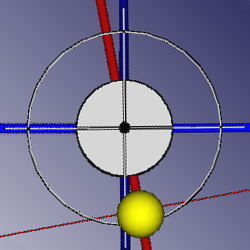
星の移動は真下ではありませんが、この垂直軸(望遠鏡を中心と考えた)とのずれた角度が、
調整する角度に一致する?ので、図のように十字線があると早く合せられるかもしれません。
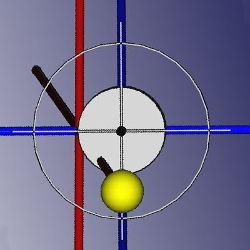
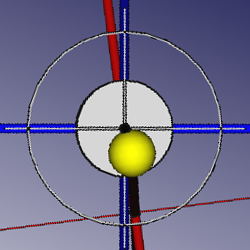
実際には天体望遠鏡は上下左右逆さで、濃いグレーの視野の様に見えるはずですから、
星の流れる方向と逆に調節するという事ですね。
同様に左右にずれている時には、星が左右に流れるという事なのでしょう。
今度試してみることにします・・・がっ、今日も雨、明日は、雪???
天気の方もままならないようです。
追加)これが本来の、「ドリフト法」と呼ばれるもののようです?
[左右の補足です]
考えを巡らせていたのですが、左右も上下にずれそうです。
色々なサイトでもやはりこんな感じですので、
星が上下にずれている場合、左右の方位方向に望遠鏡をうごかすことになりますでしょうか?
では、一番上の様に極軸から上下に望遠鏡がずれている場合どう星が動くのが正解なのでしょう?
いろいろな方が(おもに海外の人です)述べているのを拝見すると上下ではなく左右にずれるとしているのです。
どうなのでしょう???この辺は実際に観測するとして今のところ、
星が中心線からずれているときに高度調節の対象とした方がいいという事ですね。
これらを踏まえて、ドリフト法の調整法は、
①望遠鏡極軸と垂直にして、モータードライブを起動する。
②その位置で見える星を中心になるよう配置し、しばらくして、
上下にずれるようなら、中心線と重なるように、左右に三脚の調整装置(方位調整)で望遠鏡を動かします。
すると、中心から星がずれますので、また中心になる様に、赤経・緯微動(モータードライブのスイッチ?)で調整します。
何度か繰り返す。
③左右にずれるようなら、三脚の調整装置(高度調整)で、上下に望遠鏡を動かす。
また中心になる様に、赤経・緯微動(モータードライブのスイッチ?)で調整します。
何度か繰り返す。
こんな感じに、方位から調整したほうがよさそう、となるでしょうか?
雨ばかりで確認できないのが残念です・・・
まえ、ちょっと他の考えがというのはまた違った考えに発展していて、頭の中で熟成中?です。
うまく煮詰まりましたらご紹介するかもです。
え~考えが浮かびましたので、dumboのメモです。
以前極軸合せで、改良ドリフト法をご紹介しましたが、もう少し簡単な方法をと模索?迷走?瞑想しましたので~
図示しますとこんな感じで、至極簡単です。
(ご存知の方はいまさらという事でお恥ずかしい)
要は、極軸と垂直の方に望遠鏡を向けてガイドモーターを動かすという事です。
図のように望遠鏡の軸が、極軸より上になっている場合、
望遠鏡で見える星が下(望遠鏡は回転しますので、望遠鏡を中心と考えて)に移動していくという事です。
図ではわかりやすいように6時間後を表しています。
星の移動は真下ではありませんが、この垂直軸(望遠鏡を中心と考えた)とのずれた角度が、
調整する角度に一致する?ので、図のように十字線があると早く合せられるかもしれません。
実際には天体望遠鏡は上下左右逆さで、濃いグレーの視野の様に見えるはずですから、
星の流れる方向と逆に調節するという事ですね。
同様に左右にずれている時には、星が左右に流れるという事なのでしょう。
今度試してみることにします・・・がっ、今日も雨、明日は、雪???
天気の方もままならないようです。
追加)これが本来の、「ドリフト法」と呼ばれるもののようです?
[左右の補足です]

考えを巡らせていたのですが、左右も上下にずれそうです。
色々なサイトでもやはりこんな感じですので、
星が上下にずれている場合、左右の方位方向に望遠鏡をうごかすことになりますでしょうか?
では、一番上の様に極軸から上下に望遠鏡がずれている場合どう星が動くのが正解なのでしょう?
いろいろな方が(おもに海外の人です)述べているのを拝見すると上下ではなく左右にずれるとしているのです。
どうなのでしょう???この辺は実際に観測するとして今のところ、
星が中心線からずれているときに高度調節の対象とした方がいいという事ですね。
これらを踏まえて、ドリフト法の調整法は、
①望遠鏡極軸と垂直にして、モータードライブを起動する。
②その位置で見える星を中心になるよう配置し、しばらくして、
上下にずれるようなら、中心線と重なるように、左右に三脚の調整装置(方位調整)で望遠鏡を動かします。
すると、中心から星がずれますので、また中心になる様に、赤経・緯微動(モータードライブのスイッチ?)で調整します。
何度か繰り返す。
③左右にずれるようなら、三脚の調整装置(高度調整)で、上下に望遠鏡を動かす。
また中心になる様に、赤経・緯微動(モータードライブのスイッチ?)で調整します。
何度か繰り返す。
こんな感じに、方位から調整したほうがよさそう、となるでしょうか?
雨ばかりで確認できないのが残念です・・・
まえ、ちょっと他の考えがというのはまた違った考えに発展していて、頭の中で熟成中?です。
うまく煮詰まりましたらご紹介するかもです。
花びらバーティノフマスク flower bahtinov mask [顕微鏡・機材など]
一応の完成?が出来ましたので、ご状介です。

キャップにスッポリとはめるとこんな感じになります。
黄色いのは下敷きの再利用で別に深い意味は・・・
4mm程度のABS樹脂でしょうか、キャップをくり抜いて、
真ん中の板を、一気にミーリングしましたので、歪んでいます。
ちゃんと固定すればそんなことは無いのでしょうが。
さて、実際はシュミレートして良さそう?
と思って作成しましたので、話が前後しますが、
前と同じようにシュミレート用のマスク(白黒画像)を作成し、
再生できない場合、ダウンロードは🎥こちら
ピントの合っているところを少し止めてビデオを作成しました。
movは
シュミレートではすごくいい感じに、思いません?
なので、今度は実際に試してみました。
φ80mmの屈折ですから、設計と違いますが、
再生できない場合、ダウンロードは🎥こちら
movは
ぶれていますし、画像が粗いのでうーんな感じでした。
さすがに、ピントノブを動かしながらの撮影は無理のようです。
静止画では、
となって、結構ピントは合わせやすいです。
とっ、ご報告まででした。
追加)こんな感じに撮れました。

追尾にまだ問題があるのですが、だいぶオリオン大星雲らしくなってますでしょうか?
ガイドに関しては改良案がありますので、もし成功しましたらご紹介します。

キャップにスッポリとはめるとこんな感じになります。
黄色いのは下敷きの再利用で別に深い意味は・・・
4mm程度のABS樹脂でしょうか、キャップをくり抜いて、
真ん中の板を、一気にミーリングしましたので、歪んでいます。
ちゃんと固定すればそんなことは無いのでしょうが。
さて、実際はシュミレートして良さそう?
と思って作成しましたので、話が前後しますが、

前と同じようにシュミレート用のマスク(白黒画像)を作成し、
再生できない場合、ダウンロードは🎥こちら
ピントの合っているところを少し止めてビデオを作成しました。
movは
ダウンロードは🎥こちら
シュミレートではすごくいい感じに、思いません?
なので、今度は実際に試してみました。
φ80mmの屈折ですから、設計と違いますが、
再生できない場合、ダウンロードは🎥こちら
movは
ダウンロードは🎥こちら
ぶれていますし、画像が粗いのでうーんな感じでした。
さすがに、ピントノブを動かしながらの撮影は無理のようです。
静止画では、

となって、結構ピントは合わせやすいです。
とっ、ご報告まででした。
追加)こんな感じに撮れました。

追尾にまだ問題があるのですが、だいぶオリオン大星雲らしくなってますでしょうか?
ガイドに関しては改良案がありますので、もし成功しましたらご紹介します。
バーティノフマスクのシュミレーター bahtinov mask Maskulator [顕微鏡・機材など]
どのようなパターンがドウ?オ?なるのか計算で求めてみようと、(学問カテゴリーですから)
ちょっと考え中のdumboです。
うと、おどっちなのでしょう???
みなさん色々考えておられるようで(ウ・オのことではなく)、
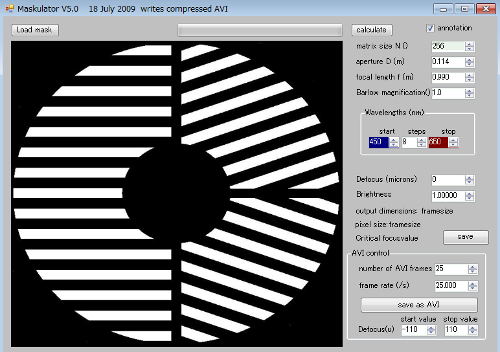
Maskulatorというのが定番ソフトとして有名らしいです。
面白いので息抜きに使ってみると、
おおっ、動画が作成できるのでした。
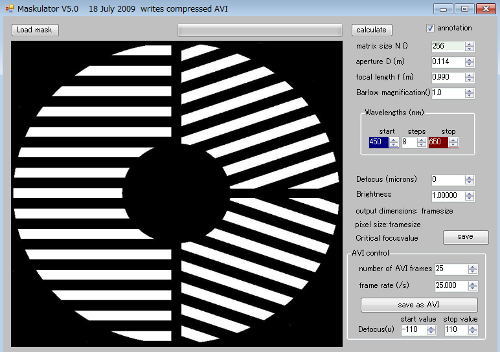
パラメーターはこんな感じです。あってます?
マスクの実物をカメラで撮影し、load maskボタンを押して、 calculateしますと、
画像が出来ますので、プリントスクリーンして実際の画像と比較しました。

μフォーサーズですと、1600~2000万画素で
3.5μm位の画素ピッチでらしいので、計算で使用されるデータはだいたい合っているのでしょう。
17.3mm×13mm:4592×3448(15833216画素)換算ですと0.00377×0.00377μmとなり、
計算値=画素ピッチかは、?ですが見た目は結構似ていますね。
このあと、動画を作成してみました。
同様にマスクの実物をカメラで撮影し、調整後jpeg保存(gimpで)して、
load maskで読み込んで(maskulatorで)、aviで保存(maskulatorで動画を作成し)、
使用したマスクを0.25秒付け足して(ムービーメーカーで)・・
0.125倍速に変えると見やすいかな?
ポチポチポチ、ちまちまちまっと、数十分で完成、便利です。
いつもながら、いいソフト、皆様ありがとうというところです。
本当に有難う御座います、です。汗
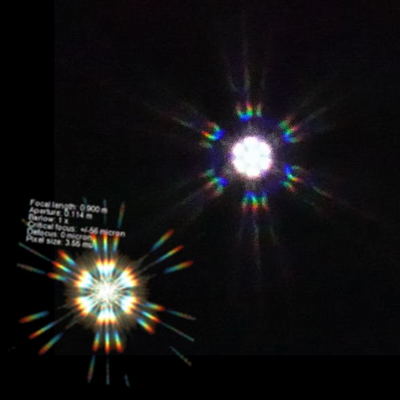
普通のものは、(生成される範囲は-500~500μmとしています)
再生できない場合、ダウンロードは🎥こちら
movは
回折格子を応用した?マスクですから、線の並びと直行した方向に光のラインが伸びるのでしょう。
1mm以下ではなくても、受光素子が細かいし、
光源も点なら、スリットが大きくてもいいようです。
ピント合わせはどうなのか?と気になるのでざっと計算しますと。
ピントを調整するノブを1回転するとだいたい35mm動きましたので、
10°で、35/(360/10)=0.9722、約1mm。
動画を見ますときっちりピントを合わせられそうなのは(パラメーターが合っているなら?)40μm、
程度の精度が必要そうですので、
1/0.04=25、10°を25等分の0.4°の精度でノブを回転しなければいけないという・・・
どう?お?りでピント合わせが難しいというわけなのですね。
微動ノブが欲しいところ???溜息~~~ふぅ
6本なのか?はこんな感じ
再生できない場合、ダウンロードは🎥こちら
シンプルなソフトですが素晴らしいお仕事です。
自分でプログラムを作る必要性が・・・感じ・・・られませんっと、いいわけ、笑
さて、これからすると「6本なのか?」も結構いけているような?
風が無い日にもう一度ためさないといけないようです。
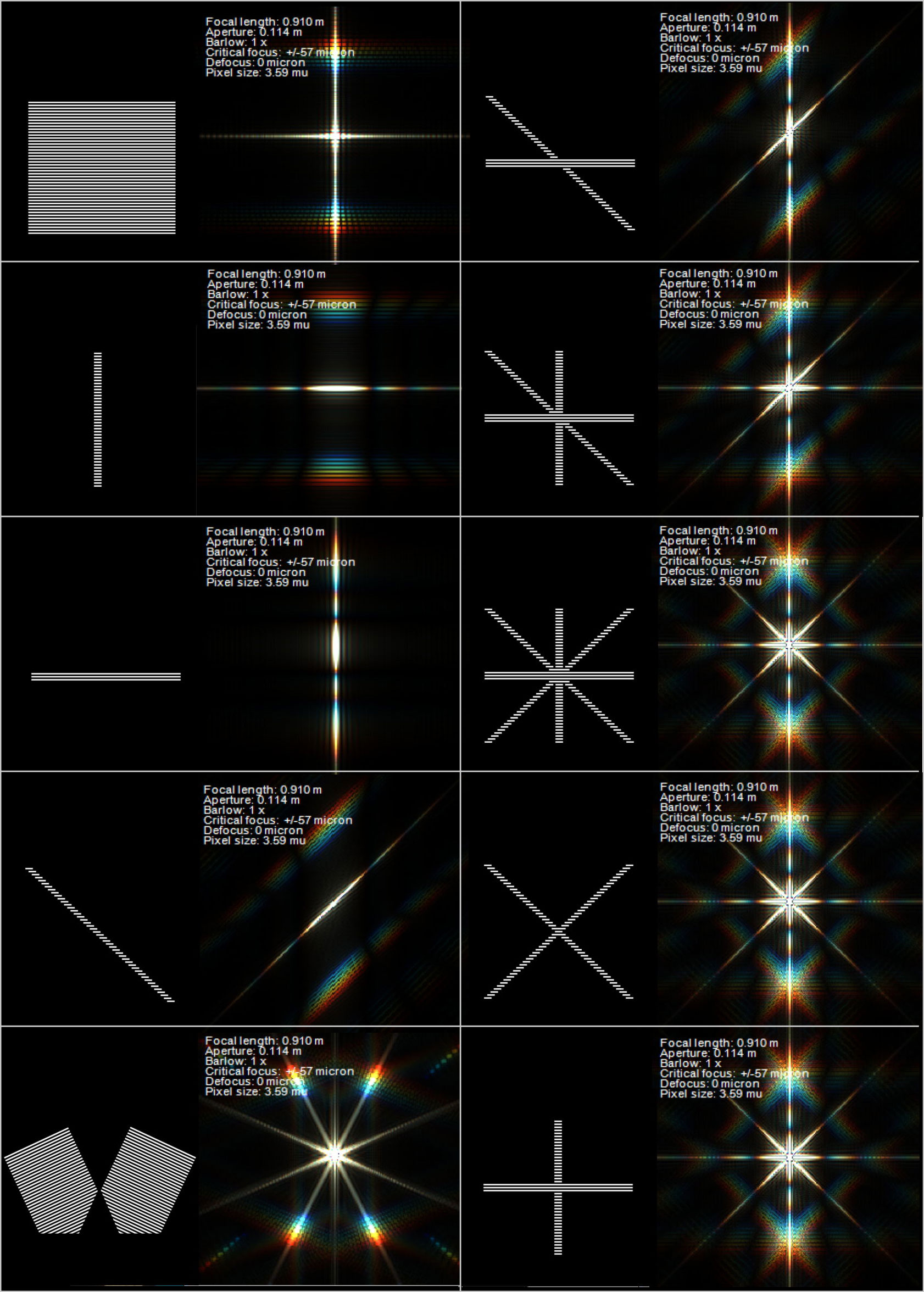
追加)いろんなマスクでためしてみました。
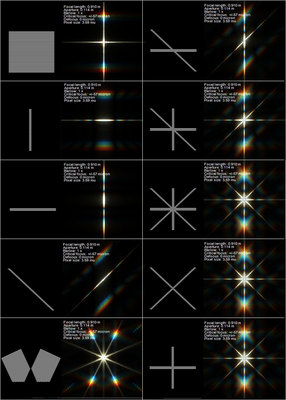
ご参考になりますでしょうか。
細かいので別画面で見て下さいねっ。
追加の追加)ざっと試しましたところ、
再生できない場合、ダウンロードは🎥こちら
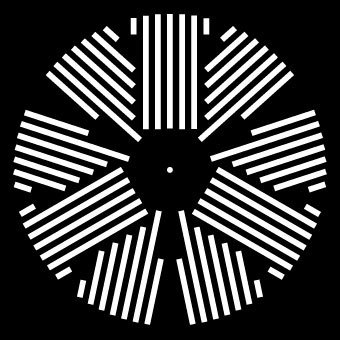
こんな形のものが良さそうでした。この動画では生成される範囲を-1000~1000μmとしています。
誰かが考案なさっていると思いますが、花びらマスクとでも名付けましょうか?
今度作ってためしてみることにしましょう。
解答)
ドウ?オ?は、その通りにだから、ドオり
どう?お?は、そういう理屈でなので、道理で、どうり
合ってます?日本語って大変ですね。
ちょっと考え中のdumboです。
うと、おどっちなのでしょう???
みなさん色々考えておられるようで(ウ・オのことではなく)、
Maskulatorというのが定番ソフトとして有名らしいです。
面白いので息抜きに使ってみると、
おおっ、動画が作成できるのでした。
パラメーターはこんな感じです。あってます?
マスクの実物をカメラで撮影し、load maskボタンを押して、 calculateしますと、
画像が出来ますので、プリントスクリーンして実際の画像と比較しました。

μフォーサーズですと、1600~2000万画素で
3.5μm位の画素ピッチでらしいので、計算で使用されるデータはだいたい合っているのでしょう。
17.3mm×13mm:4592×3448(15833216画素)換算ですと0.00377×0.00377μmとなり、
計算値=画素ピッチかは、?ですが見た目は結構似ていますね。
このあと、動画を作成してみました。
同様にマスクの実物をカメラで撮影し、調整後jpeg保存(gimpで)して、
load maskで読み込んで(maskulatorで)、aviで保存(maskulatorで動画を作成し)、
使用したマスクを0.25秒付け足して(ムービーメーカーで)・・
0.125倍速に変えると見やすいかな?
ポチポチポチ、ちまちまちまっと、数十分で完成、便利です。
いつもながら、いいソフト、皆様ありがとうというところです。
本当に有難う御座います、です。汗
普通のものは、(生成される範囲は-500~500μmとしています)
再生できない場合、ダウンロードは🎥こちら
movは
ダウンロードは🎥こちら
回折格子を応用した?マスクですから、線の並びと直行した方向に光のラインが伸びるのでしょう。
1mm以下ではなくても、受光素子が細かいし、
光源も点なら、スリットが大きくてもいいようです。
ピント合わせはどうなのか?と気になるのでざっと計算しますと。
ピントを調整するノブを1回転するとだいたい35mm動きましたので、
10°で、35/(360/10)=0.9722、約1mm。
動画を見ますときっちりピントを合わせられそうなのは(パラメーターが合っているなら?)40μm、
程度の精度が必要そうですので、
1/0.04=25、10°を25等分の0.4°の精度でノブを回転しなければいけないという・・・
どう?お?りでピント合わせが難しいというわけなのですね。
微動ノブが欲しいところ???溜息~~~ふぅ
6本なのか?はこんな感じ
再生できない場合、ダウンロードは🎥こちら
ダウンロードは🎥こちら
シンプルなソフトですが素晴らしいお仕事です。
自分でプログラムを作る必要性が・・・感じ・・・られませんっと、いいわけ、笑
さて、これからすると「6本なのか?」も結構いけているような?
風が無い日にもう一度ためさないといけないようです。
追加)いろんなマスクでためしてみました。
ご参考になりますでしょうか。
細かいので別画面で見て下さいねっ。
追加の追加)ざっと試しましたところ、
再生できない場合、ダウンロードは🎥こちら
ダウンロードは🎥こちら
こんな形のものが良さそうでした。この動画では生成される範囲を-1000~1000μmとしています。
誰かが考案なさっていると思いますが、花びらマスクとでも名付けましょうか?
今度作ってためしてみることにしましょう。
解答)
ドウ?オ?は、その通りにだから、ドオり
どう?お?は、そういう理屈でなので、道理で、どうり
合ってます?日本語って大変ですね。



